Resumo do projeto

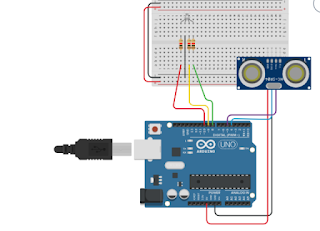
O nosso projeto Status de distância usando LED, começou quando nós escolhemos ele no dia 12 de outubro, porém ele sofreu algumas alterações no caminho. No começo iriamos fazer com 6 LEDs coloridas, depois mudamos para 3, e então decidimos usar o LED RGB no lugar. No dia 16 de outubro começamos a montar o projeto pelo tinkercard durante a aula de laboratório de física, usando o sensor ultrassônico para medir a velocidade usando a distância de captação do sensor, para isso usamos o LED RGB e com o tempo para a mudança de cor do LED, usando essa relação, saberemos a velocidade do objeto. No dia 21 de outubro, fizemos o primeiro teste no arduino em casa, porém a detecção do sensor não estava muito precisa. No dia 23 de outubro, nós postamos o código do projeto - parte 1, e durante a aula, fizemos alterações no código, e durante esta mesma aula, fizemos o segundo teste no arduino, porém a detecção do sensor ainda não estava muito precisa pelo fato da detecção do sensor não ser em linha...